Jiawei Zhang (张嘉玮)
Jiawei Zhang (张嘉玮)
主页
科研项目
科研成果(论文)
科研成果(专利)
教育背景
学术服务
荣誉获奖
联系方式
个人简历
Light
Dark
Automatic
决策规划
CAVSim: a microscopic traffic simulator for evaluation of connected and automated vehicles
面向高级别自动驾驶技术的自动驾驶仿真平台.
张嘉玮
,
Cheng Chang
,
Zimin He
,
Wenqin Zhong
,
Danya Yao
,
Shen Li
,
Li Li
PDF
Cite
Code
Project
DOI
Follow
Multi-agent DRL-based lane change with right-of-way collaboration awareness
首个多智能体换道算法,突破传统的单智能体算法的性能瓶颈.
张嘉玮
,
Cheng Chang
,
Xianlin Zeng
,
Li Li
PDF
Cite
Project
DOI
Follow
CAVSim: A microscope traffic simulator for connected and automated vehicles environment
面向高级别自动驾驶技术的自动驾驶仿真平台.
张嘉玮
,
Cheng Chang
,
Huaxin Pei
,
Xinyu Peng
,
Yuqing Guo
,
Renzong Lian
,
ZhenwuChen
,
Li Li
PDF
Cite
Code
Project
DOI
Follow
自动驾驶汽车自主决策
本项目面向高级别自动驾驶技术需求,开展安全可信的自动驾驶汽车自主决策相关研究。考虑不同任务的特异性,分别提出了基于深度强化学习的路线规划算法、 基于多智能体的换道决策算法、自动驾驶汽车安全预警算法、以及基于深度模型的BEV数据融合预测算法,为实现安全、高效、协同、可信的智能驾驶提供了理论和技术支撑。
自动驾驶路线规划
自动驾驶换道决策
自动驾驶安全预警
BEV感知融合与预测
智能网联汽车协同决策
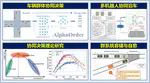
本项目重点研究智能网联汽车协同决策理论与应用,针对典型场景下的协同决策问题,提出了基于深度学习模型的协同决策算法、基于深度强化学习的协同泊车算法、协同决策容错与自愈算法等先进方法,实现了大规模场景下实时求解、效率最优、安全可信、容错自愈的协同决策性能,为智能网联汽车技术的综合落地应用奠定了理论基础。
车辆群体协同决策
多机器人智能泊车
智能群系统容错与自愈
协同决策理论研究
Cite
×