智能网联汽车协同决策
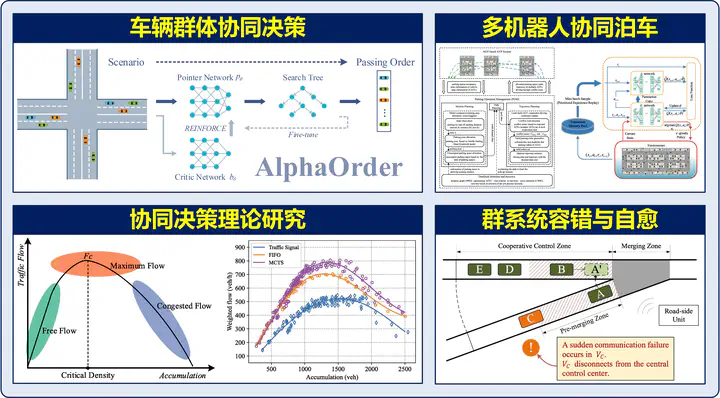 Photo by rawpixel on Unsplash
Photo by rawpixel on Unsplash研究工作1:车辆群体协同决策
针对智能网联汽车协同决策面临的强交互、解空间巨大、强实时性等挑战,本研究提出基于深度模型的决策规划算法。该算法通过结合离线深度学习模型和在线蒙特卡洛树搜索,实现了求解速度最快、效率最优、规模最大的决策规划性能,比SOTA算法提高了55.6%。该研究为各类稀缺资源实时调度问题提供了通用的算法。详见该研究工作的简介。

研究工作2:多机器人智能泊车
针对群体机器人泊车系统面临的调度规模巨大、决策耦合、低效死锁等挑战,本研究提出了基于深度强化学习的决策调度算法。该研究构建了智能分层决策系统,提出了群体机器人宏观任务调度、中观路线规划、微观协同决策、死锁监测自愈等一体化算法,显著提高了群体机器人的作业效率,任务平均耗时降低14%。详见该研究工作的简介。

研究工作3:智能群系统容错与自愈
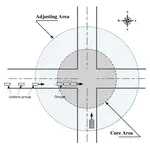
针对智能网联汽车面临的通信故障和机械故障,本研究提出了针对潜在故障的容错驾驶决策算法。该研究通过构建动态驾驶策略,实现了在保证安全的前提下,提高驾驶效率。作为最早将通信故障情况引入智能驾驶模型的研究,该研究解决了限制智能网联汽车发展的重大现实问题。详见该研究工作的简介。
- 论文1: Fault-tolerant cooperative driving at signal-free intersections (简介; Paper)
- 论文2: Fault-tolerant cooperative driving at highway on-ramps considering communication failure (简介; Paper)

研究工作4:协同决策理论研究
本研究对智能网联汽车协同决策问题开展了理论研究,分析了协同决策的内在机理,揭示了不同决策算法之间的本质区别,构建了以宏观基本图为核心的评估体系,验证了协同决策的瓶颈要素:二维路权冲突。该研究为智能网联汽车技术的进一步发展与应用指明了方向,具有重要的学术价值。详见该研究工作的简介。
- 论文1: Analysis of cooperative driving strategies at road network level with macroscopic fundamental diagram (简介; Paper)
- 论文2: Theoretical analysis of cooperative driving at idealized unsignalized intersections (简介; Paper)