自动驾驶汽车自主决策
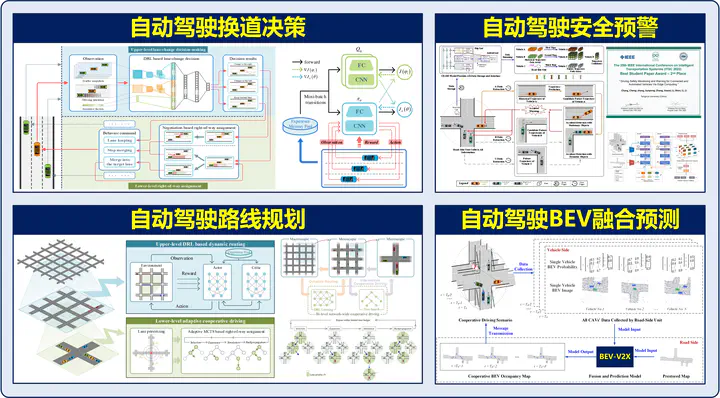 Photo by rawpixel on Unsplash
Photo by rawpixel on Unsplash研究工作1:自动驾驶路线规划
针对自动驾驶路线规划问题面临的系统复杂、信息有限、决策耦合等挑战,本研究提出了基于深度强化学习的路线规划算法。通过创新的深度强化学习状态空间和奖励函数、分层决策机制、分布式自组织路线规划范式,实现了前馈、主动高效的路线规划性能,自动驾驶汽车的出行耗时平均降低11%,交通巨系统的整体效率提高14%。详将该研究工作的简介。
- 论文1: A bi-level network-wide cooperative driving approach including deep reinforcement learning-based routing (简介; Paper)
- 论文2: Self-organized routing for autonomous vehicles via deep reinforcement learning (简介; Paper)

研究工作2:自动驾驶换道决策
针对智能驾驶决策任务中的强交互、多目标、机理模糊等挑战,本研究提出了首个基于多智能体深度强化学习的换道决策算法。通过安全可信的复合决策框架、全新的多智能体决策模型、基于行为意图的状态信息编码,突破了单智能体决策范式的性能瓶颈,自动驾驶行车效率提高9%、安全性提高70%,并涌现出群体协同智能。详将该研究工作的简介。

研究工作3:自动驾驶安全预警
针对自动驾驶安全监测预警面临的预警范围有限、预警不及时、虚警率高等挑战,本研究提出了基于边缘计算的自动驾驶安全监测与预警算法。该算法通过全新的安全预警框架和基于深度模型的车辆轨迹预测,实现了更全面、更可信、更及时的自动驾驶安全监测与预警,预警命中率超过80%,为当前性能最佳。详将该研究工作的简介。
- 论文1: Driving safety monitoring and warning for connected and automated vehicles via edge computing (简介; Paper)

研究工作4:自动驾驶BEV融合预测
针对自动驾驶鸟瞰图(Birds-Eye-View, BEV)感知任务面临的信息不准确、范围不足、可解释性差等挑战,本研究提出了基于V2X的BEV数据融合预测模型。该模型基于注意力神经网络,实现了感知范围更广、预测精度更高、可解释性更强的BEV融合与预测性能。该模型突破了现有的单车BEV融合模型的性能瓶颈,预测准确性提高超过15%。详将该研究工作的简介。
- 论文1: BEV-V2X: cooperative Birds-Eye-View fusion and grid occupancy prediction via V2X-based data sharing (简介; Paper)






